
This follows on pretty much directly from the previous post about reflected Brownian motion. Recall that this is a process defined on the non-negative reals which looks like Brownian motion away from 0. We consider whether RBM is the only such process, and how any alternative might be constructed as a limit of discrete-time Markov processes.
One of the alternatives is called Sticky Brownian motion. This process spends more time at 0 than reflected Brownian motion. In fact it spends some positive proportion of time at 0. My main aim here is to explain why some intuitive ideas I had about how this might arise are wrong.
The first thought was to ensure that each visit to 0 last some positive measure of time. This could be achieved by staying at 0 for an Exp(1) duration, every time the process visited it. It doesn’t seem unreasonable that this might appear as the limit of a standard SRW adjusted so that on each visit to 0 the walker waits for a time given by independent geometric distributions. These distributions are memoryless, so that is fine, but by Blumenthal’s 0-1 Law, starting from 0 a Brownian motion hits zero infinitely many times before any small time t. So in fact the process described above would be identically zero as before it gets anywhere it would have to spend some amount of time at 0 given by an infinite sum of Exp(1) RVs.
We will return later to the question of why the proposed discrete-time model will still converge to reflected BM rather than anything more exotic. First though, we should discount the possibility of any intermediate level of stickiness, where the set of times spent at 0 still has measure zero, but the local time at 0 grows faster than for standard reflected BM. We can define the local time at 0 through a limit

of the measure of time spent very near 0, rescaled appropriately. So if the measure of the times when the process is at 0 is zero, then the local time is determined by behaviour near zero rather than by behaviour at zero. More precisely, on the interval ![[-\epsilon,\epsilon]](https://s0.wp.com/latex.php?latex=%5B-%5Cepsilon%2C%5Cepsilon%5D&bg=ffffff&fg=333333&s=0&c=20201002)
At this stage, it seems sensible to define Sticky Brownian motion. For motivation, note that we are looking for a process which spends a positive measure of time at 0. So let’s track this as a process, say 
So it makes sense to construct the extra time spent at zero from the local time of a standard reflected BM. The heuristic is that we slow down the process whenever it is at 0, so that local time becomes real time. We can also control the factor by which this slowing-down happens, so define

where L is the local time process of an underlying reflected BM, and 




It is worth thinking about what the generator of this process should be. In particular, why should it be different to reflected BM? The key observation is that the drift of the underlying reflected BM is essentially infinite at 0. By slowing down the process at 0, this drift becomes finite. So the martingale associated with sticky BM is precisely a time-changed version of the martingale associated with the underlying reflected BM, but this time-change is precisely what is required to give a generator. We get:
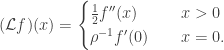
Now that we have the generator, it starts to become apparent how sticky BM might appear as a limit of discrete-time walks. The process must look like mean-zero, unit-variance RW everywhere except near 0, where the limiting drift should be 


This highlights one confusing matter about convergence of reflected processes. The boundary of the discrete-time process should converge to the boundary of the reflected process, but we also have to consider where reflective behaviour happens. Can we get sticky BM with reflection only at the boundary in the discrete-time processes? The answer turns out to be no. At the start of this article, I proposed a model of SRW with geometric waiting times whenever the origin was visiting. What is the limit of this?
The trick is to consider how long the discrete process spends near 0, after rescaling. It will spend a multiple 1/p more time at 0 itself, where p is the parameter of the geometric distribution, but no more time than expected at any point 

Because of all of this, in practice it seems that most random walks we might be interested in converge (if they converge to a process at all) to a reflected SDE/diffusion etc, rather than one with sticky boundary conditions. I feel I’ve been talking a lot about Markov processes converging, so perhaps next, or at least soon, I’ll write some more technical things about exactly what conditions and methods are required to prove this.
REFERENCES
S. Varadhan – Chapter 16 from a Lecture Course at NYU can be found here.
Related articles
- Markovian Excursions (eventuallyalmosteverywhere.wordpress.com)
- Brownian motion and stochastic calculus e-book downloads (okroxon.wordpress.com)
- 254A, Notes 3b: Brownian motion and Dyson Brownian motion (terrytao.wordpress.com)

